![[vPython] Pókrobot -szimulátor: 4 lépés](https://i.howwhatproduce.com/images/003/image-8663-22-j.webp "[vPython] Pókrobot -szimulátor: 4 lépés")
Tartalomjegyzék:
- Szerző John Day day@howwhatproduce.com.
- Public 2024-01-30 09:43.
- Utoljára módosítva 2025-01-23 14:48.


Ha érdekesnek találja a tervemet, adományozhat egy kis összeget:
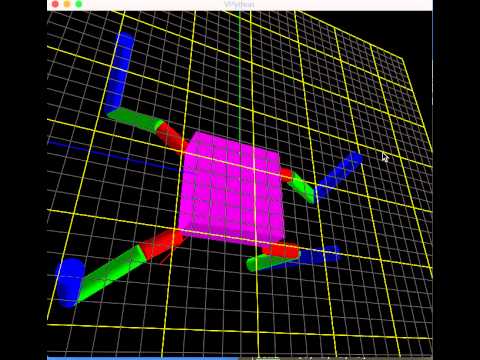
A vPython segítségével szimulálom a pókrobotom műveleteit. Ezzel könnyen fejlesztheti saját érdeklődési lépéseit a pc/mac rendszerben, majd átviheti az arduino -ba.
Ott van az igazi robot oktatható, ha érdekli
www.instructables.com/id/DIY-Spider-RobotQu…
A VPython a Python programozási nyelve és egy 3D -s grafikus modulja, a "visual", amelyet David Scherer 2000 -ben hozott létre. A VPython megkönnyíti a navigálható 3D -s megjelenítések és animációk létrehozását, még azok számára is, akik korlátozott programozási tapasztalattal rendelkeznek. Mivel a Pythonon alapul, sokat kínál a tapasztalt programozóknak és kutatóknak.
1. lépés: Telepítse a VPython és szerkesztőt


telepítse a python -t , Javaslom a 2.7.x használatát
www.python.org/
majd a vpython
vpython.org/
és a kedvenc szerkesztőm - a PyCharm
www.jetbrains.com/pycharm/
2. lépés: Töltse le a kódot és futtassa

Töltse le a kódot, és nyissa meg a PyCharm segítségével, futtassa a kódot, és megjelenik egy divatos 3D pókrobot a képernyőn, és a középső gombbal nagyíthatja/kicsinyítheti, a jobb gombbal pedig forgathatja.
3. lépés: Fejlessze műveleteit ebbe a szimulátorba
Jó móka lesz, ha érdekes cselekedeteket tud kifejleszteni, és megosztja velem.
4. lépés: Távirányító a valódi pókrobothoz
Mit szólnál ahhoz, hogy irányítsd az igazi robotot a python gondolat Bluetooth segítségével? Érdemes lehet kipróbálni az utat. Később közzéteszem, ha valakinek szüksége van rá.
Ajánlott:
A mérföldes négylábú pókrobot: 5 lépés

"Miles" a négylábú pókrobot: Az Arduino Nano alapján Miles egy pókrobot, amely 4 lábával jár és jár. 8 SG90 / MG90 szervo motort használ a lábak működtetőjeként, egy egyedi PCB -ből áll, amely a szervók és az Arduino Nano működtetésére és vezérlésére készült. A PCB dedikált
DC - DC feszültség Lépés lekapcsoló mód Buck feszültségátalakító (LM2576/LM2596): 4 lépés
: 4 lépés")
DC-DC feszültség Lépés lekapcsoló üzemmód Buck feszültségátalakító (LM2576/LM2596): A rendkívül hatékony bakkonverter készítése nehéz feladat, és még a tapasztalt mérnököknek is többféle kivitelre van szükségük, hogy a megfelelőt hozzák létre. egy DC-DC áramátalakító, amely csökkenti a feszültséget (miközben növeli
Négylábú pókrobot - GC_MK1: 8 lépés (képekkel)
")
Négylábú pókrobot - GC_MK1: A pókrobot, más néven GC_MK1 előre -hátra mozog, és táncolhat az Arduino -ra töltött kódtól függően. A robot 12 mikroszervómotort (SG90) használ; 3 minden lábhoz. A szervomotorok vezérlésére használt vezérlő egy Arduino Nan
[DIY] Pókrobot (négyes robot, négylábú): 14 lépés (képekkel)
![[DIY] Pókrobot (négyes robot, négylábú): 14 lépés (képekkel)](https://i.howwhatproduce.com/images/001/image-1641-34-j.webp "[DIY] Pókrobot (négyes robot, négylábú): 14 lépés (képekkel)")
[DIY] Pókrobot (Quad Robot, Quadruped): Ha további támogatásra van szüksége tőlem, akkor jobb, ha adományoz nekem megfelelő adományt: http: //paypal.me/RegisHsu2019-10-10 frissítés: Az új fordító lebegő számok számítási problémáját okozza. A kódot már módosítottam. 2017-03-26
[DIY] Pókrobot - II. RÉSZ - Távirányító: 5 lépés
![[DIY] Pókrobot - II. RÉSZ - Távirányító: 5 lépés](https://i.howwhatproduce.com/images/003/image-8661-16-j.webp "[DIY] Pókrobot - II. RÉSZ - Távirányító: 5 lépés")
[DIY] Pókrobot - II. RÉSZ - Távirányító: Ha érdekesnek találja a tervezésemet, adományozhat egy kis összeget: bluetooth. Itt az első rész-https://www.instructables.com/id/DIY-Spider-Ro