")
Tartalomjegyzék:
- 1. lépés: Ellátási lista
- 2. lépés: Áttekintés és vázlat
- 3. lépés: Kefe nélküli motor vezérlése Arduino segítségével
- 4. lépés: A lézerlemez -alváz elkészítése
- 5. lépés: Lézeres és szervomotoros összeszerelés
- 6. lépés: A csúszógyűrű felszerelése
- 7. lépés: Az elektronika forrasztása
- 8. lépés: Az elektronikai doboz felépítése
- 9. lépés: Elektronika telepítése a dobozba
- 10. lépés: Az ultrahangos érzékelők felszerelése és bekötése
- 11. lépés: A dinamikus lézerörvény programozása
- Szerző John Day day@howwhatproduce.com.
- Public 2024-01-30 09:40.
- Utoljára módosítva 2025-01-23 14:47.

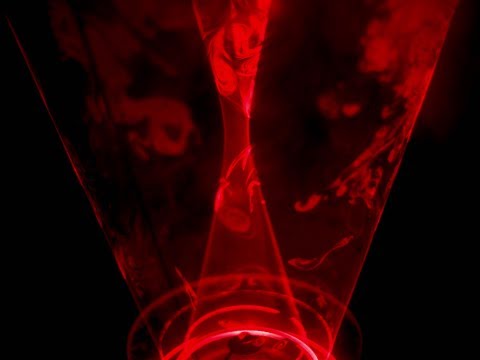


A lézerek hihetetlen vizuális effektek létrehozására használhatók. Ebben a projektben új típusú lézer kijelzőt készítettem, amely interaktív és zenét játszik le. A készülék két lézert forgat, hogy két örvényszerű fénylapot képezzen. A távolságérzékelőket a készülékbe helyeztem, hogy a lézerlapokat úgy lehessen kezelni, hogy a kezét feléjük mozdítsa. Amint a személy kölcsönhatásba lép az érzékelőkkel, a készülék zenét is játszik MIDI kimeneten keresztül. Lézerhárfákból, lézerörvényekből és POV -kijelzőkből származó ötleteket tartalmaz.
A műszert egy Arduino Mega vezérli, amely felveszi az ultrahangos érzékelők bemeneteit, és kimeneti típusú lézerlapot és zenét generál. A forgó lézerek sok szabadságfoka miatt rengeteg különböző lézerlemez -minta hozható létre.
Előzetes ötletelést folytattam a projekten egy új art/tech csoporttal St. Louis -ban, Dodo Flock néven. Emre Sarbek néhány kezdeti tesztet is végrehajtott a készülék közelében lévő mozgás észlelésére használt érzékelőkön.
Ha lézerlemez -eszközt épít, ne felejtse el biztonságosan kezelni a lézereket és a forgó tárcsákat.
2020 -as frissítés: rájöttem, hogy a lézerekkel létrehozott felület hiperboloid.
1. lépés: Ellátási lista



Anyagok
Lézerek -
Kefe nélküli motor -
Elektronikus sebességszabályozó -
Szervómotorok -
Tranzisztorok
Furnér
Plexiüveg
Ultrahangos érzékelők
Slipring -
Fehér LED -ek -
Buck konverterek
Drótkötél huzal
MIDI csatlakozó
Potenciométer és gombok -
Hardver - https://www.amazon.com/gp/product/B01J7IUBG8/ref=o…https://www.amazon.com/gp/product/B06WLMQZ5N/ref=o…https://www.amazon. com/gp/product/B06XQMBDMX/ref = o…
Ellenállások
JST csatlakozó kábelek -
AC tápkapcsoló
12V -os tápegység -
Fa ragasztó
pillanatragasztó
Fa csavarok
USB hosszabbító kábel -
Eszközök:
Forrasztópáka
Drótvágók
Lombfűrész
Körfűrész
Mikrométer
Villanyfúró
2. lépés: Áttekintés és vázlat

A lézersugár jól kollimált (azaz keskeny) fénysugarat hoz létre, így a fénylemez előállításának egyik módja a sugár gyors elmozdítása valamilyen mintában. Például egy hengeres fénylemez létrehozásához egy lézert elforgat egy tengely körül, amely párhuzamos az irányával. A lézer gyors mozgatásához lézert rögzíthet egy kefe nélküli egyenáramú motorhoz rögzített fa deszkára. Egyedül ezzel hűvös hengeres lézerörvényeket hozhat létre!
Más lézeres örvényprojektek ezt úgy érik el, hogy döntött tükröt szerelnek fel a forgástengelyre, és a tükörre irányított álló lézert. Ez lézerlemez kúpot hoz létre. Ezzel a kialakítással azonban úgy tűnik, hogy minden lézerlap egyetlen forrásból származik. Ha a lézereket a tengelytől eltérően helyezik el, mint az általam készített konstrukcióban, akkor konvergáló lézerlapokat hozhat létre, például a videóban látható homokóra alakját.
De mi van, ha azt szeretné, hogy a fénylapok dinamikusak és interaktívak legyenek? Ennek eléréséhez két lézert rögzítettem a szervókra, majd a szervókat a fa deszkára. Most a szervók beállíthatják a lézer szögét a motor forgástengelyéhez képest. Ha két lézert használ két különböző szervón, akkor két különböző fénylapot hozhat létre a készülékkel.
Az egyenáramú motor fordulatszámának szabályozása érdekében egy potenciométert csatlakoztattam egy Arduino -hoz, amely felveszi a potenciométer bemenetét és jelet ad ki az elektromos fordulatszám -szabályozónak (ESC). Az ESC ezután szabályozza a motor fordulatszámát (meglehetősen megfelelő név, igen), a potenciométer ellenállásától függően.
A lézer be-/kikapcsolt állapotát a telítettséggel működő (azaz elektromos kapcsolóként működő) tranzisztor emitteréhez kell csatlakoztatni. A tranzisztor bázisára vezérlőjelet küldünk, amely a lézeren keresztül szabályozza az áramot. Itt van egy forrás a terhelés vezérléséhez egy arduino tranzisztorral:
A szervók helyzetét szintén az Arduino vezérli. A deszka forgása közben a fénylemez a szervo helyzet megváltoztatásával kezelhető. Felhasználói beavatkozás nélkül ez önmagában dinamikus fénylapokat hozhat létre, amelyek elbűvölőek. A készülék széle körül ultrahangos érzékelők is találhatók, amelyek segítségével megállapítható, hogy valaki a kezét a fénylemezek közelébe teszi -e. Ezt a bemenetet vagy a lézerek mozgatására használják új fénylapok létrehozására, vagy MIDI jel generálására. MIDI jack csatlakozik, hogy továbbítsa a MIDI jelet egy MIDI lejátszó eszközre.
3. lépés: Kefe nélküli motor vezérlése Arduino segítségével



Örvényszerű fénylemezek létrehozásához forgassa el a lézersugarat. Ennek érdekében úgy döntöttem, hogy megpróbálok kefe nélküli egyenáramú motort használni. Megtanultam, hogy az ilyen típusú motorok nagyon népszerűek a repülőgép -modellek és a drónok körében, ezért arra gondoltam, hogy nagyon könnyű használni. Útközben találkoztam néhány akadással, de összességében elégedett vagyok a motor működésével a projekthez.
Először is fel kell szerelni a motort. Egyedi alkatrészt terveztem a motor megtartásához és a készüléket tartó táblához való rögzítéséhez. Miután a motor rögzítve volt, csatlakoztattam a motort az ESC -hez. Az olvasottak alapján nagyon nehéznek tűnik ecset nélküli motor használata nélkül. A motor forgatásához egy Arduino Mega -t használtam. Kezdetben nem tudtam megpörgetni a motort, mert éppen a vezérlőjelet csatlakoztattam 5V -ra vagy a földre, anélkül, hogy megfelelően beállítottam volna az alapértéket vagy kalibráltam volna az ESC -t. Ezután követtem egy Arduino oktatóanyagot potenciométerrel és szervomotorral, és ez megindította a motort! Itt egy link az oktatóanyaghoz:
Az ESC vezetékek valójában bármilyen módon csatlakoztathatók a kefe nélküli motorhoz. Szüksége lesz néhány női banán csatlakozóra. Az ESC vastagabb piros és fekete kábelei 12 V feszültségű egyenáramú tápegységhez vannak csatlakoztatva, az ESC vezérlőcsatlakozóján lévő fekete és fehér kábelek pedig földeléshez, illetve egy vezérlőcsap az Arduino -hoz. Nézze meg ezt a videót az ESC kalibrálásáról:
4. lépés: A lézerlemez -alváz elkészítése



A motor forgása után ideje felépíteni a könnyű lemezvázat. CNC gép segítségével vágtam le egy rétegelt lemez darabot, de használhat szúrófűrészt is. A rétegelt lemez tartja az ultrahangos érzékelőket, és lyuk van benne, hogy elférjen egy darab plexi. A plexit a fához kell rögzíteni epoxi segítségével. Furatokat fúrnak a csúszógyűrű áthaladásához.
Ezután egy másik kör alakú rétegelt lemez lapot vágunk, hogy tartsa a kefe nélküli motort. Ebben a falapban lyukakat fúrnak, hogy a huzalok a konstrukció későbbi szakaszaiban áthaladhassanak. A motor tartó és a lyukak fúrása után a két rétegelt lemezt 1x3 deszkával, körülbelül 15 cm hosszú vágással és fém konzolokkal rögzítik. A fotón láthatja, hogyan áll a plexi a motor és a lézerek felett.
5. lépés: Lézeres és szervomotoros összeszerelés



A változó fénylapokat lézerek mozgatásával hozzák létre a forgástengelyhez képest. Megterveztem és 3D -ben kinyomtattam egy szerelvényt, amely lézert rögzít egy szervóhoz, és egy tartószerkezetet, amely összeköti a szervót a forgó deszkával. Először rögzítse a szervót a szervo tartóhoz két M2 csavar segítségével. Ezután csúsztasson egy M2 anyát a lézer tartóba, és húzza meg a rögzítőcsavart, hogy a lézer a helyén maradjon. Mielőtt a lézert a szervóhoz csatlakoztatná, győződjön meg arról, hogy a szervo a középső működési helyzetbe van forgatva. A szervo oktatóanyag segítségével irányítsa a szervót 90 fokra. Ezután csavar segítségével szerelje fel a lézert a képen látható módon. Hozzá kellett adnom egy csipet ragasztót is, hogy a lézer ne mozduljon el véletlenül.
Lézervágóval készítettem a deszkát, amelynek mérete körülbelül 3 x 20 cm. A fénylap maximális mérete a fa deszka méretétől függ. Ezután lyukat fúrtak a deszka közepére, hogy az illeszkedjen a kefe nélküli motor tengelyére.
Ezután a lézer-szervo szerelvényt a deszkára ragasztottam úgy, hogy a lézerek középre kerüljenek. Győződjön meg arról, hogy a deszka minden alkatrésze kiegyensúlyozott a deszka forgástengelyéhez képest. Forrasztja a JST csatlakozókat a lézerekhez és a szervókábelekhez, hogy a következő lépésben csatlakoztatható legyen a csúszógyűrűhöz.
Végül rögzítse a deszkát a hozzá tartozó lézer-szervo egységekkel az alátéttel és anyával a kefe nélküli motorra. Ezen a ponton tesztelje a kefe nélküli motort, hogy megbizonyosodjon arról, hogy a deszka képes forogni. Ügyeljen arra, hogy ne vezesse túl gyorsan a motort, és ne tegye a kezét a deszka forgási útjába.
6. lépés: A csúszógyűrű felszerelése


Hogyan akadályozhatja meg a vezetékek összegabalyodását az elektronika forgása közben? Az egyik módszer az, hogy akkumulátort használ a tápegységhez, és csatlakoztatja a centrifugáló egységhez, mint ebben a POV utasításban. Egy másik módszer a papucs használata! Ha még nem hallott parittyafűrészről vagy használt ilyet, nézze meg ezt a remek videót, amely bemutatja, hogyan működik.
Először rögzítse a JST csatlakozók másik végét a csúszógyűrűhöz. Nem akarja, hogy a vezetékek túl hosszúak legyenek, mert a deszka forgatásakor megragadhatnak valamit. Csatlakoztattam a csúszógyűrűt a plexiüveghez a kefe nélküli motor fölé, hogy furatokat fúrjak a csavarokhoz. Ügyeljen arra, hogy fúráskor ne repedjen meg a plexi. Lézervágóval is pontosabb lyukakat kaphat. Miután csatlakoztatta a csúszógyűrűt, csatlakoztassa a csatlakozókat.
Ezen a ponton csatlakoztathatja a csúszógyűrűs vezetékeket egy Arduino csapjaihoz, hogy elvégezzen néhány előzetes tesztet a lézerlemez -generátorral.
7. lépés: Az elektronika forrasztása




Kivágtam egy prototípus táblát az összes elektronika csatlakoztatásához. Mivel 12V-os tápegységet használtam, két egyenáramú egyenáramú átalakítót kell használnom: 5V a lézerekhez, szervókhoz, potenciométerekhez és MIDI aljzathoz, és 9V az Arduinohoz. Mindent összekapcsoltak az ábra szerint, forrasztással vagy huzalcsomagolással. A lapot ezután egy 3D nyomtatott részhez kötötték PCD leállások segítségével.
8. lépés: Az elektronikai doboz felépítése




Minden elektronika egy fadobozban található. 1x3 fűrészárut vágtam a doboz oldalaihoz, és az egyik oldalon nagy nyílást vágtam, hogy a vezérlőpanelen lévő vezetékek áthaladhassanak. Az oldalakat kis fadarabokkal, faragasztóval és csavarokkal kötötték össze. Miután a ragasztó megszáradt, lecsiszoltam a doboz oldalait, hogy kiegyenlítsem a doboz minden hiányosságát. Ezután vékony fát vágtam a doboz elejéhez, hátához és aljához. Az alját oldalra szögezték, az elülső és a hátsó részt pedig a dobozra ragasztották. Végül megmértem és lyukakat vágtam a doboz előlapján található alkatrészek méretéhez: a tápkábel csatlakozója, az usb csatlakozó, a MIDI jack és a potenciométer.
9. lépés: Elektronika telepítése a dobozba



A tápegységet a dobozhoz csavarokkal, az Arduino -t egy egyedi kialakítású tartószerkezettel, valamint a 7. lépésben létrehozott áramköri lapot csatlakoztattam. A potenciométert és a MIDI aljzatot először huzalcsomagoló huzal segítségével csatlakoztatták az áramköri laphoz, majd ragasztották a előlap. A váltóáramú aljzatot a tápegységhez, a tápegység egyenáramú kimenetét pedig a kefe nélküli motorhoz csatlakozó Buck -átalakítók és kábelek bemeneteihez kötötték. A motor-, szervo- és lézervezetékeket ezután a rétegelt lemez lyukán keresztül vezetik le az elektronikai dobozig. Mielőtt az ultrahangos érzékelőkkel foglalkoznék, egyenként teszteltem az alkatrészeket, hogy megbizonyosodjak arról, hogy minden megfelelően van -e bekötve.
Kezdetben váltóáramú tápegységet vásároltam, de olvastam néhány rossz véleményt arról, hogy olvad, így helytelen méretű lyukak voltak az előlapon. Ezért úgy terveztem és 3D -ben kinyomtattam néhány jack adaptert, hogy megfeleljenek a kivágott lyukak méretének.
10. lépés: Az ultrahangos érzékelők felszerelése és bekötése



Ezen a ponton a lézerek, a szervók, a kefe nélküli motor és a MIDI jack csatlakozik az Arduino -hoz és vezérelhetők. Az utolsó hardverlépés az ultrahangos érzékelők csatlakoztatása. Megterveztem és 3D -ben kinyomtattam egy ultrahangos érzékelőt. Ezután bekötöttem és egyenletesen rögzítettem az ultrahangos érzékelőegységeket a fénylemez -generátor felső rétegelt lemezére. A huzaltekercselő huzalt a rétegelt lemez lapjain keresztül fúrták le az elektronikai dobozhoz. A drótköteget az Arduino megfelelő csapjaihoz kötöttem.
Kicsit csalódott voltam az ultrahangos érzékelő teljesítményében. Nagyon jól működtek az 1-30 cm közötti távolságoknál, de a távolságmérés nagyon zajos ezen a tartományon kívül. A jel / zaj arány javítása érdekében megpróbáltam több mérés mediánját vagy átlagát venni. A jel azonban továbbra sem volt elég megbízható, így végül beállítottam a határértéket egy hang lejátszásához vagy a lézerlap 25 cm-es cseréjéhez.
11. lépés: A dinamikus lézerörvény programozása

Miután a kábelezés és az összeszerelés befejeződött, ideje programozni a fénylemez eszközt! Sok lehetőség van, de az általános ötlet az, hogy vegyük be az ultrahangos érzékelők bemeneteit, és küldjünk jeleket a MIDI -hez, valamint a lézerek és szervók vezérléséhez. Minden programban a deszka forgását a potenciométer gomb elforgatásával lehet szabályozni.
Két könyvtárra lesz szüksége: NewPing és MIDI
Mellékelve a teljes Arduino kód.


Második díj az Invention Challenge 2017 -ben
Ajánlott:
BBC Micro: bit and Scratch - Interaktív kormánykerék és vezetési játék: 5 lépés (képekkel)
")
BBC Micro: bit and Scratch - Interaktív kormánykerék és vezetési játék: Ezen a héten az egyik osztályfeladatom az, hogy a BBC Micro: bitet használom az általunk írt Scratch programmal való interfészhez. Úgy gondoltam, hogy ez a tökéletes alkalom arra, hogy a ThreadBoard -om segítségével beágyazott rendszert hozzak létre! Az inspirációm a karcoláshoz
Arduino interaktív LED dohányzóasztal: 6 lépés (képekkel)
")
Arduino Interactive LED dohányzóasztal: Készítettem egy interaktív dohányzóasztalt, amely felkapcsolja a LED -es lámpákat egy tárgy alatt, amikor a tárgyat az asztal fölé helyezik. Csak azok a LED -ek világítanak, amelyek az adott tárgy alatt vannak. Ezt hatékonyan teszi közelségérzékelők használatával, és amikor a proximit
Interaktív LED csempefal (egyszerűbb, mint amilyennek látszik): 7 lépés (képekkel)
: 7 lépés (képekkel)")
Interaktív LED csempefal (egyszerűbb, mint amilyennek látszik): Ebben a projektben egy interaktív LED falikijelzőt építettem egy Arduino és 3D nyomtatott alkatrészek felhasználásával. A projekt inspirációja részben a Nanoleaf lapokból származik. Szerettem volna egy saját verziót kitalálni, amely nemcsak megfizethetőbb, hanem egyben
Interaktív LED -lámpa - Tensegrity Structure + Arduino: 5 lépés (képekkel)
")
Interaktív LED -lámpa | Tensegrity Structure + Arduino: Ez a darab egy mozgásra érzékeny lámpa. A minimális feszültségű szoborként tervezett lámpa megváltoztatja a színek konfigurációját az egész szerkezet tájolásának és mozgásának megfelelően. Más szóval, a tájolástól függően a
Arduino interaktív társasjáték: 5 lépés (képekkel)
")
Arduino interaktív társasjáték: Interaktív társasjáték - HAC-KINGIntro: Voor het vak If This Then That van de opleiding Games & Interactie aan HKU kregen we de opdracht om een interactief concept te bedenken en maken. Ez a koncepció a legjobb gemaakt worden hardverrel és szoftverrel