
Tartalomjegyzék:
- Szerző John Day day@howwhatproduce.com.
- Public 2024-01-30 09:41.
- Utoljára módosítva 2025-01-23 14:48.

Egy ideje közzétettem a Wifi PPM vezérlőmet. Elég jól működik. Csak a hatótáv egy kicsit rövid. Találtam megoldást erre a problémára. Az ESP8266 támogatja az ESPNOW nevű módot. Ez az üzemmód sokkal alacsonyabb szintű. Nem lazítja meg a csatlakozást olyan könnyen, és ha megszakítja a kapcsolatot, azonnal újra csatlakoztatja.
Három ESP8266 -ot használok. Az egyik az ESPNOW vevő, a másik az ESPNOW feladó, a harmadik pedig a hozzáférési pont, amelyhez csatlakozhat. A harmadikra azért van szükség, mert az ESPNOW feladó nem lehet hozzáférési pont egyszerre. Hozzáadtam néhány antennát is a jobb hatótávolság eléréséhez.
Van egy második hozzáférési pont közvetlenül a vevőnél. Ha ehhez csatlakozik, ugyanaz lesz, mint a régi WifiPPM projektnél.
Hozzáadtam az MSP protokoll -vevő támogatását is. Ez a "MultiWii soros protokoll", amelyet a MultiWii, a Betaflight, a Cleanflight és sok más repülésvezérlő támogat.
1. lépés: Alkatrészlista




Három ESP8266 modulra van szüksége. De a legjobb tartományt szeretné. Ezért azt javaslom, hogy ESP8266 modulokat használjon antennákkal. Antenna nélkül is működik. A következő részeket használom:
2 x ESP07 (ESP8266 modul antenna csatlakozóval)
1 x ESP12
1 x 3dBi Mini Antenne I-PEX U. FL IPX a vevő oldalán
1 x ESP8266 2, 4 /5 GHz 3dbi Wlan Wifi Antenna SMA Stecker / férfi + I-PEX adapter a feladó oldalán
3, 3 V -os tápegység minden ESP8266 modulhoz
Szüksége van egy Arduino IDE -vel rendelkező számítógépre is: https://www.arduino.cc/en/Main/SoftwareESP8266 az Arduino IDE támogatásához. Kövesse ezeket az utasításokat: https://learn.sparkfun.com/tutorials/esp8266-thin…Websocket könyvtár Arduino számára:
2. lépés: Töltse le és frissítse a vázlatokat



A vázlatokat innen töltheti le.
Csomagolja ki a fájlt. Három mappa van: Master-AP, Sender, Receiver
Master-AP: Ez a hozzáférési pont vázlata. Nyissa meg a vázlatot arduino IDE segítségével. Állítsa be a CPU frekvenciáját 160 MHz -re az Eszközök menüben, és töltse fel a vázlatot az ESP12 -re.
Feladó: Ez az MSPNOW feladó vázlata. Állítsa a CPU frekvenciáját 160 MHz -re, és töltse fel az ESP07 egyikére.
Az első képen láthatja, hogyan kell csatlakoztatni az ESP8266 modult a villogáshoz.
Most csatlakoztassa az ESP12 (hozzáférési pont) és a küldő ESP07 soros portokat és tápcsatlakozásokat (második kép): ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
Indítsa el mindkét modult, és csatlakozzon a "Long-Range-WifiPPM/MSP" hozzáférési ponthoz. A jelszó "WifiPPM/MSP"
Nyisson meg egy böngészőt, és nyissa meg a 192.168.4.1 IP -címet. Megjelenik a vezérlő webhely. Kattintson a "Wifi Info" gombra. Megjelenik egy üzenetdoboz a feladó MAC -jával és a fogadó MAC -vel.
Nyissa meg a vevő vázlatát Arduino IDE -ben. Módosítsa az "uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6};" sort (harmadik kép) a feladó Mac -címére, amely megjelenik a webhelyen. A Mac vevőnek rendben kell lennie. Győződjön meg arról, hogy a CPU frekvenciája 160 MHz -re van állítva, és töltse fel a vázlatot a második ESP05 -re.
3. lépés: Csatlakoztassa a vevőkészüléket a repülésvezérlőhöz és telepítse a Cleanflight programot



Most csatlakoztassa a vevőkészüléket a repülésvezérlőhöz. A repülésvezérlőnek 3, 3 voltos kimenettel kell rendelkeznie, legalább 200 mA -rel. Ha nem, akkor további 3, 3 V feszültségszabályozóra van szüksége.
Csatlakoztassa az ESP GND -jét a repülésvezérlő GND -jéhez. Csatlakoztassa az ESP VCC -jét a repülésvezérlő 3, 3 V -hoz vagy a további 3, 3 V -os feszültségszabályozóhoz.
Használhatja a PPM kimenetet vagy a soros MSP kimenetet.
MSP kimenethez csatlakoztassa az ESP8266 TX -jét a repülésvezérlő bármely soros portjának RX -hez. (1. kép)
PPM kimenethez csatlakoztassa az ESP8266 GPIO5 -ét a repülésvezérlő PPM bemenetéhez. (1. kép)
Az ESP bekötése után indítsa el a repülésvezérlőt, és nyissa meg a tiszta repülést. Csatlakozzon mobiltelefonjával a "WifiPPM/MSP" hozzáférési ponthoz. A jelszó "WifiPPM/MSP"
MSP esetén: Nyissa meg a portok lapot, és állítsa be az MSP -t az ESP8266 -hoz csatlakoztatott soros portra (2. kép). Mentse és indítsa újra. Lépjen a konfigurációs fülre, és állítsa a vevőt "MSP soros vevő" -re (3. kép). Mentse el és indítsa újra.
PPM esetén: Olvassa el a repülésirányító kézikönyvében, hogyan kell beállítani a PPMGo -t a konfigurációs fülre, és a vevőt "PPM -vevő" -re állítani (4. kép). Mentse el és indítsa újra.
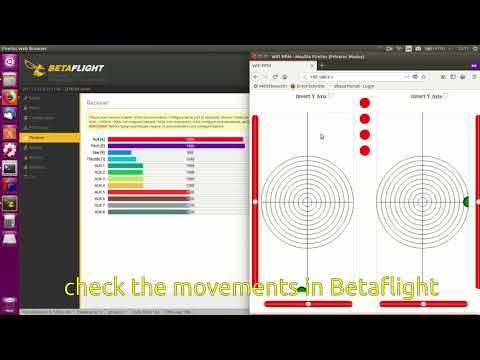
A következő beállítás mindkét vevőegységre ugyanaz: Lépjen a vevő fülre. Állítsa a csatornákat "RTAE1234" -re (5. kép/videó). Mentse el a beállítást.
Most nyisson meg egy böngészőt az okostelefonján. Nyissa meg a 192.168.4.1 webhelyet (6. kép). Most ellenőrizheti a vezérlőt.
Ha működik, indítsa el a két küldőt ESP8266. Csatlakozzon a "Nagy hatótávolságú WifiPPM/MSP" hozzáférési ponthoz. A jelszó "WifiPPM/MSP". Nyissa meg újra a 192.168.4.1 webhelyet. Ellenőrizze újra a cleanflight -ban, ha működik.
Csatlakoztassa az antennákat az ESP07 modulokhoz.
4. lépés: Néhány további információ

Normál üzemmódban két hozzáférési pont van. A "WifiPPM/MSP" hozzáférési pont olyan, mint az előző WifiPPM projekt. Használhatja, ha csak gyors repülést szeretne végezni további modulok csatlakoztatása nélkül, ha nincs szüksége távolsági kapcsolatra. Ha a "Long Range WifiPPM/MSP" -hez csatlakozik, akkor a nagy hatótávolságú vezérlő veszi át az irányítást.
Talán szeretné tudni, milyen hosszú a "nagy hatótávolság". Valójában nem igazán tudom. Legalább néhány száz méter. De eddig nem tudtam tesztelni. Nem veszíti el a kapcsolatot a teljes lakásomban.
Hozzáadtam az MSP vezérlést, mert azt hittem, hogy létrehozhatok egy hátsó csatornát a telemetriai adatokhoz. De ez soha nem működött stabilan. Egyébként az MSP protokoll pontosabb, mint a ppm, mert nem annyira függ az időzítéstől. Talán problémákat okoz a lassú repülésvezérlőkkel, mert nagy a forgalom a soros porton. A Noxe F4 repülésvezérlőmmel gond nélkül működik.
Ha bármilyen konfigurációs problémája van, nézze meg a régi WifiPPM projektet.
Ajánlott:
HC-12 nagy hatótávolságú időjárás állomás és DHT érzékelők: 9 lépés

HC-12 nagy hatótávolságú időjárás állomás és DHT érzékelők: Ebben az oktatóanyagban megtanuljuk, hogyan készítsünk távoli időjárási állomást két dht érzékelő, HC12 modul és az I2C LCD kijelző segítségével. Nézze meg a videót
Első lépések a nagy hatótávolságú vezeték nélküli hőmérséklet- és rezgésérzékelőkkel: 7 lépés

Első lépések a nagy hatótávolságú vezeték nélküli hőmérséklet- és rezgésérzékelőkkel: Néha a vibráció komoly problémák oka lehet sok alkalmazásban. A géptengelyektől és csapágyaktól a merevlemez teljesítményéig a rezgés a gép károsodását, korai cseréjét, gyenge teljesítményét okozza, és nagy hatást gyakorol a pontosságra. Figyelés
IoT- Ubidots-ESP32+nagy hatótávolságú vezeték nélküli rezgés- és hőmérséklet-érzékelő: 7 lépés

IoT-Ubidots-ESP32+Nagy hatótávolságú, vezeték nélküli rezgés- és hőmérséklet-érzékelő: A vibráció valóban ide-oda mozgás-vagy rezgés-a gépek és alkatrészek között a motoros eszközökben. Az ipari rendszerben fellépő vibráció lehet a probléma tünete vagy indítéka, vagy társulhat a mindennapi működéshez. Például az osci
Nagy hatótávolságú WiFi szkenner ESP8266 használatával: 6 lépés (képekkel)
")
Hosszú hatótávolságú WiFi -szkenner az ESP8266 használatával: Ebben az utasításban elemmel működő, hordozható, nagy hatótávolságú, 2,5 sávos WiFi szkennelési eszközt készítek, amely meghatározza, melyik csatorna a legjobb az otthoni hálózatomhoz. Ezenkívül útközben nyitott WiFi hozzáférési pontok keresésére is használható. Elkészítési költség: körülbelül 25 dollár
Nagy teljesítményű, nagy hatótávolságú, rendkívül pontos toll íj !!!: 6 lépés

Nagy teljesítményű, nagy hatótávolságú, rendkívül pontos toll íj !!!: Ez egy másik a híres toll íjak közül !!! =) Élvezd! P.S. ezek a dolgok erőteljesek, ne célozz valakit. Beleértve az embereket és az állatokat. Ez az első utasítható kérésem