")
Tartalomjegyzék:
- 1. lépés: Hogyan működik az adagolás?
- 2. lépés: Kérjük, vegye figyelembe az indítás előtt
- 3. lépés: Gyűjtse össze az összes anyagot
- 4. lépés: Különböző méretek
- 5. lépés: A test elkészítése
- 6. lépés: A hajtómű összeszerelése és a lemezek gyártása
- 7. lépés: Hullámjellemzők manuális beállítása
- 8. lépés: Elektronikus kapcsolatok és programozás
- 9. lépés: A hajtóművek vezérlése menüvezérelt program segítségével
- 10. lépés: A Wave Tank kezelése
- Szerző John Day day@howwhatproduce.com.
- Public 2024-01-30 09:42.
- Utoljára módosítva 2025-01-23 14:48.



A hullámtartály egy laboratóriumi berendezés a felszíni hullámok viselkedésének megfigyelésére. A tipikus hullámtartály egy folyadékkal, általában vízzel töltött doboz, amely nyitott vagy levegővel teli teret hagy a tetején. A tartály egyik végén egy hajtómű hullámokat generál; másik vége általában hullámelnyelő felülettel rendelkezik.
Általában ezek a tartályok sok pénzbe kerülnek, ezért megpróbáltam igazán olcsó megoldást találni azoknak a diákoknak, akik szeretnék használni a tartályt projektjeik tesztelésére.
1. lépés: Hogyan működik az adagolás?
Tehát a projekt két állítóműből áll, amelyek v-hornyú alumínium extrudálással készültek.
Minden léptetőmotorhoz egy léptetőmotor van csatlakoztatva, és mindkét motort ugyanaz a léptetőmotor hajtja, így nincs késés.
Az Arduino a motorvezérlő vezérlésére szolgál. A menüvezérelt program segítségével bemenet adható a számítógépen keresztül csatlakoztatott arduionhoz. A hajtóműlemezek a v-horony portáljára vannak felszerelve, amelyek a motorok beindulása után oda-vissza mozognak, és ez a lemezek oda-vissza mozgása generálja a hullámokat a tartályban. A hullámmagasság és a hullámhossz megváltoztatható a sebesség változtatásával motor arduino -n keresztül.
2. lépés: Kérjük, vegye figyelembe az indítás előtt

A legtöbb apró dologgal nem foglalkoztam az arduino használatával vagy a hegesztéssel, hogy ez az oktatóanyag kicsi és könnyen érthető legyen. A legtöbb hiányzó dolog törlődik a képeken és a videókban. Kérjük, írjon nekem üzenetet, ha bármilyen probléma vagy kérdés merül fel a projekttel kapcsolatban.
3. lépés: Gyűjtse össze az összes anyagot
- Arduino mikro vezérlő
- 2*léptetőmotor (2,8 kg cm forgatónyomaték motoronként)
- 1*Léptetőmotor -meghajtó
- 2*V nyílású portálrendszer
- Acél vagy vas lemezek a tartály testéhez
- L-merevítők a test alátámasztására
- Szálas vagy műanyag lemez a hajtóműlemez készítéséhez
- Vezetékek 48 voltos egyenáramú tápegység
Nem adtam hozzá anyagokat a v-slot portálhoz, mert a lista nagyon nagy lesz, akkor csak a google v-slot sok videót fog kapni az összeszereléssel kapcsolatban, 2040 alumínium extrudálást használtam. A motorteljesítmény és a tápegység kapacitása megváltozik, ha nagyobb terhelést szeretne hordozni.
A tartály méretei
Hossza 5,50 m
Szélessége 1,07 m
Mélység 0,50 m
4. lépés: Különböző méretek



A dolgok egyszerűsítése és a bemutató lerövidítése érdekében különböző komponensekről készítettem képeket egy skálával, így láthatja ezek méretét.
5. lépés: A test elkészítése




A test 3 mm vastag öntöttvas lemezből készül.
A tartály szélessége 1,10 méter, hossza 5 méter, magassága 0,5 méter.
A tartály teste lágy acélból készül, körülötte merevítőkkel, ahol szükséges. Az enyhe acéllemezeket a tartály méreteinek megfelelően hajlították és különböző részekre vágták. Ezeket a szakaszokat azután összehegesztéssel állították fel. A merevítőket is összehegesztették, hogy erősebb legyen a szerkezet.
Az első lemezt különböző szakaszokban a kívánt méretre hajlították, majd ezeket a részeket összehegesztették a test felállításához. Merevítőket adtak hozzá, mivel a merevítők méretei a képen láthatók
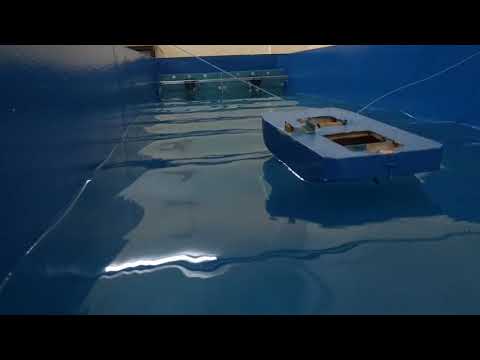
6. lépés: A hajtómű összeszerelése és a lemezek gyártása



a hajtóművek v-slot rendszerekből készülnek. Ezek nagyon olcsók és könnyen megépíthetők, és az interneten megtalálhatja a Google-on, hogyan kell összeállítani az egyiket. Az övhajtás helyett ólomcsavart használtam a teherbírás növeléséhez. Nem mellékeltem az összeszerelési útmutatót, mert az a terhelésnek megfelelően változik. Számomra a terhelés maximális sebességgel 14 kg körül volt.
A működtető lemez frp lemezből készült, akril is használható. A frp lemez támogatására rozsdamentes acél keretet építettek.
Lapát keret
A lapát keret rozsdamentes acélból készül. A rozsdamentes acél vízálló, így ellenáll a korróziónak. A lapátkerethez 2 x 2 cm -es négyzetmetszetet használtak. Erős keretre volt szükség, mivel a hullámok generálása során sok ciklikus terhelés hat a lapátra. Az acél keret nem hajlik meg, és ezáltal szabályos szinuszos hullámot generál.
Egyedi L-bilincs készült a működtető lemez és a vslot rendszer portállemezének összekapcsolására.
7. lépés: Hullámjellemzők manuális beállítása



A tartály az igényeknek megfelelően különböző hullámmagasságot generálhat. Különböző hullámmagasság generálásához a motor fordulatszámát állítják be. Ahhoz, hogy a motor nagy hullámmagasságú fordulatszámát növeljük, csökkentsük a hullám hullámhosszát is. Hasonlóan a motor hullámhosszú fordulatszámának növeléséhez csökken. Az RPM a menüben az egyéni RPM opció kiválasztásával állítható be.
Maximális fordulatszám = 250
Minimális fordulatszám = 50
Az alábbiakban a gyorsulásmérő által rögzített példa a különböző hullámmagasságokra. Az első kép a magas fordulatszámon rögzített adatok, ennek eredményeként magas hullámmagasságot kapunk. A második kép a grafikon csökkent hullámmagasságát és megnövelt hullámhosszát mutatja, amely a gyorsulásmérő által rögzített adatok, és a generált hullám tényleges hullámjellemzőit ábrázolja.
8. lépés: Elektronikus kapcsolatok és programozás

A tápegység csatlakoztatásakor ügyeljen a csatlakozási polaritásra, és csatlakoztassa a pozitív kivezetést a pozitívra, a negatívot pedig a negatívra. Csatlakoztassa a motort és a meghajtót az ábrán látható módon. Ha minden csatlakozás megfelelő, csatlakoztassa a mikrovezérlő csapjait (8, 9, 10 és 11)) léptetőmotor -vezetőnek. Csatlakoztassa a mikrokontrollert a számítógéphez USB -n keresztül. Indítsa el az Arduino IDE> Soros monitor lehetőséget.
A program benne van az oktatóanyagban, és magától értetődő, hogy kapcsolóbetűket és ha más utasításokat használ a működéséhez. Valóban egyszerű, egy középiskolás diák is megértheti.
Itt a Google Drive linkje a programhoz
Arduino vezérlőprogram
9. lépés: A hajtóművek vezérlése menüvezérelt program segítségével

Miután a mikrokontrollert megfelelően csatlakoztatta a számítógéphez, hasonló menü jelenik meg. Az opció kiválasztásához írja be az opció melletti számot, és nyomja meg az enter billentyűt
Példa:-
A „Maximális gyakorisággal történő működtetés” kiválasztásához írja be az 1 gombot, és nyomja meg az enter billentyűt.
A művelet leállításához 0 -típust és nyomja meg az enter billentyűt.
Vészmegálló
A hajtómű leállításához nyomja meg a nulla „0” gombot, és lépjen be.
A vészleállításhoz nyomja meg a mikrokapcsoló reset gombját, vagy szakítsa meg az áramellátást.
10. lépés: A Wave Tank kezelése

Ez a tank a nagy projektem részeként készült. A tartályt tesztelték különböző szabályos hullámok generálására fejtengeri állapotban egy méretezett uszályos modellhez. A hullámcső tesztelése sikeres volt. A projekt fejlesztésének összköltsége Rs volt. 81.000 (csak nyolcvanegyezer) két hónap időtartama alatt.
Ha bármilyen kérdése van, kérjük, írjon megjegyzést.

Első díj a vízi versenyen
Ajánlott:
DIY programozókábel Arduino Uno használatával - Baofeng UV -9R Plus: 6 lépés (képekkel)
")
DIY programozókábel az Arduino Uno használatával-Baofeng UV-9R Plus: Hé mindenkinek, ez egy egyszerű útmutató a Baofeng UV-9R (vagy plusz) fejhallgató / füldugó kábelének programozókábelré alakításáról Ardunio UNO USB-n keresztül Soros átalakító. [NYILATKOZAT] Nem vállalok felelősséget semmilyen kárért
A gyorsulás felügyelete a Raspberry Pi és az AIS328DQTR használatával Python használatával: 6 lépés

A gyorsulás nyomon követése a Raspberry Pi és az AIS328DQTR használatával Python használatával: A gyorsulás véges, azt hiszem, a fizika egyes törvényei szerint.- Terry Riley A gepárd elképesztő gyorsulást és gyors sebességváltozásokat használ üldözés közben. A leggyorsabb lény a parton időnként kihasználja csúcssebességét a zsákmány elkapására. Az
Neopixel Ws2812 Rainbow LED izzás M5stick-C - Szivárvány futtatása a Neopixel Ws2812 készüléken az M5stack M5stick C használatával Arduino IDE használatával: 5 lépés

Neopixel Ws2812 Rainbow LED izzás M5stick-C | Szivárvány futása a Neopixel Ws2812-en az M5stack M5stick C használatával Arduino IDE használatával: Sziasztok, srácok, ebben az oktatási útmutatóban megtanuljuk, hogyan kell használni a neopixel ws2812 LED-eket, vagy led szalagot vagy led mátrixot vagy led gyűrűt m5stack m5stick-C fejlesztőtáblával Arduino IDE-vel, és elkészítjük szivárványos mintát vele
RF 433MHZ rádióvezérlés HT12D HT12E használatával - Rf távirányító készítése HT12E és HT12D használatával 433 MHz -en: 5 lépés

RF 433MHZ rádióvezérlés HT12D HT12E használatával | Rf távirányító létrehozása HT12E és HT12D használatával 433 MHz -en: Ebben az oktatóanyagban megmutatom, hogyan készítsünk RADIO távirányítót a 433 MHz -es adó vevőmodul használatával HT12E kódolással & HT12D dekódoló IC. Ebben az utasításban nagyon olcsó komponenseket küldhet és fogadhat, mint például: HT
WAVE - a világ legegyszerűbb DIY forrasztó satuja! (PCB segítő kéz): 6 lépés (képekkel)
: 6 lépés (képekkel)")
WAVE - a világ legegyszerűbb DIY forrasztó satuja! (PCB segítő kezek): A WAVE valószínűleg a legfurcsább segítő kéz eszköz, amit valaha láttál. Miért hívják "HULLÁM" -nak? Mivel ez egy Segítő Kezek eszköz, amelyet mikrohullámú alkatrészekből építettek ki! De az a tény, hogy a WAVE furcsán néz ki, nem jelenti azt, hogy nem lehet az